樹蛙腳掌的多級微納界面濕增摩效應規律研究
發布日期:2022-03-31
瀏覽量:731次
精準醫療已列入我國“十三五規劃”的重點內容,生/機界面功能化成為精準醫療的重要課題。精準醫療器械與軟組織的濕滑接觸中,接觸界面打滑不可避免,有時會引起不必要的麻煩或事故。例如,外科醫生常采取“寧緊勿松”的夾持策略防止手術夾持滑脫,極易造成夾持過載,引起軟組織損傷;風靡全球的可穿戴柔性傳感器在皮膚冒汗后會出現測試精度下降甚至脫落失效。
為了提升濕滑生/機界面的粘附或摩擦性能,師法自然,人們基于章魚真空吸盤結構、樹蛙腳墊結構等已創新性地提出了許多新方法、新結構,成功應用于精準醫療生/機界面上。尤其,樹蛙作為一種生活在濕環境的兩棲動物,其腳墊可在無需額外壓力下產生強濕粘附/濕摩擦,人們已將樹蛙腳墊的強濕摩擦策略應用于仿生剃須刀、仿生防滑夾鉗等的研制。然而,在生/機接觸過程中,界面液膜在樹蛙腳墊結構上的動態行為規律、微納液橋形成機制及其作用規律等卻很少涉及。
北京航空航天大學陳華偉教授課題組,在江雷院士、雒建斌院士、張德遠教授等的指導下,表征了樹蛙腳掌表面的微納多級六棱柱及納凹坑結構,發現了生/機接觸過程中微納特征結構/材質協同作用下的兩種特殊液膜界面效應,即法向碎化效應、納凹坑自吸附效應。揭示了兩種界面效應對界面毛細力、微納液橋形成的影響規律,建立了強濕摩擦增效理論模型,提出了強濕摩擦表面仿生設計方法,并將其應用到仿生手術夾鉗、仿生可穿戴傳感裝置上,驗證了仿生濕增摩的有效性(圖1)。張力文博士作為第一作者,陳華偉教授為通訊作者發表于《Advanced Science》,Adv. Sci. 2020, 2001125。
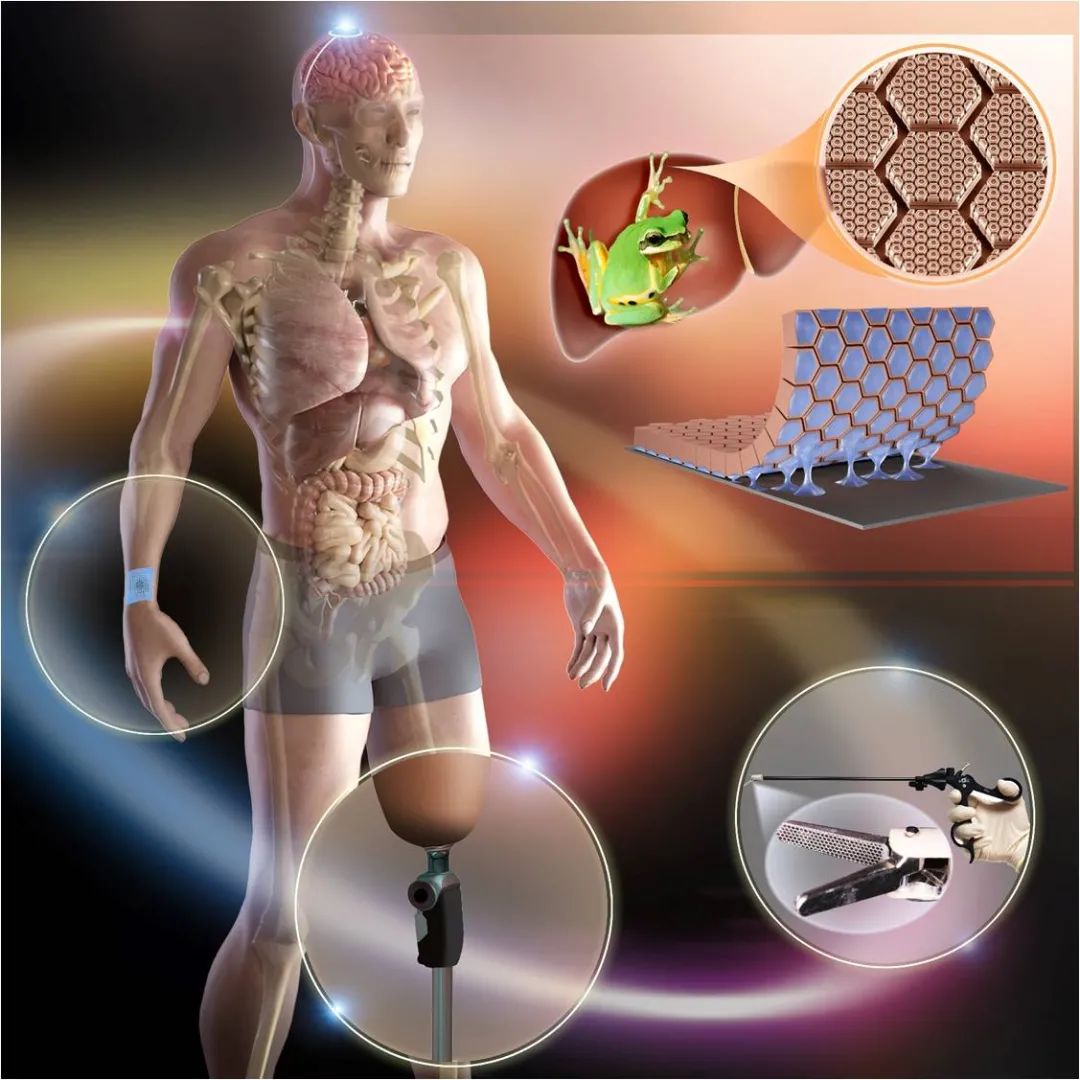
圖1 精準醫療的生/機界面
該研究通過表征樹蛙腳掌,發現其表面覆蓋著微納多級棱柱陣列,且每個納米棱柱頂部都有納米凹坑結構。為了揭示界面液膜的行為機制,師法自然設計制備出多種仿生多級結構表面,模仿模仿樹蛙爬行行為,對樹蛙腳掌和仿生表面進行了連續抬步摩擦測試(FLC),兩者表現出了極其相似的界面液膜狀態和摩擦力變化規律(圖2)。即,隨著抬步數增加,界面粘液逐漸減少,由濕變干過程中會出現一個摩擦力峰值,與濕、干狀態相比增大近百倍,明顯有別于傳統機械表面摩擦。
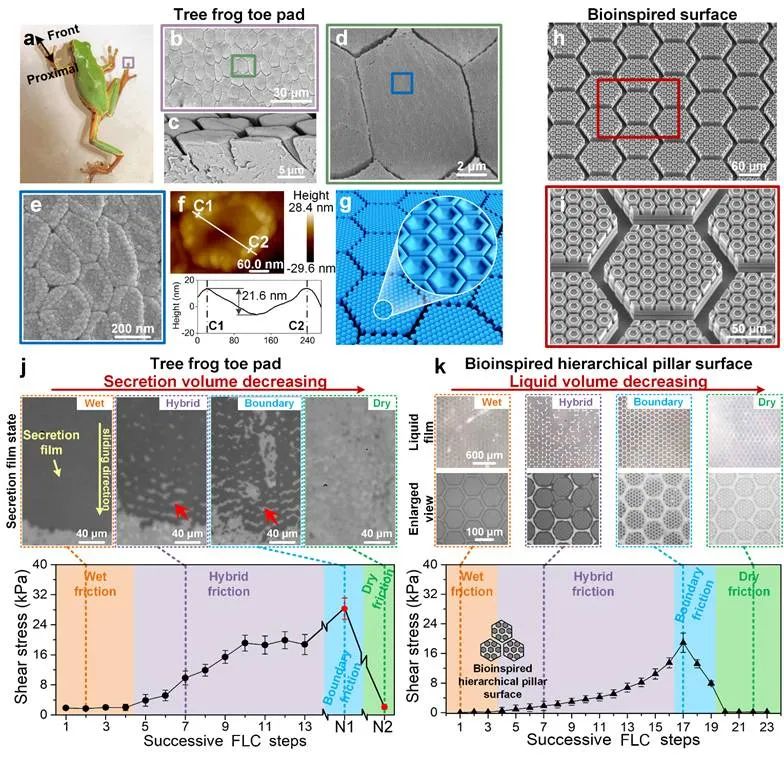
圖2 樹蛙腳墊結構表征
通過對表界面液膜原位表征,發現密排棱柱結構在抬步的過程中會自發將液膜從溝槽內均勻地分裂開,使液體運動并停留在每個棱柱表面上,即液膜自碎化。隨著界面液量減少,這種液膜分裂行為會依次出現在第一、二級棱柱表面上,達到兩級液膜自碎化效應(圖3),從而能使液膜能夠均勻地分布于整個仿生表面。
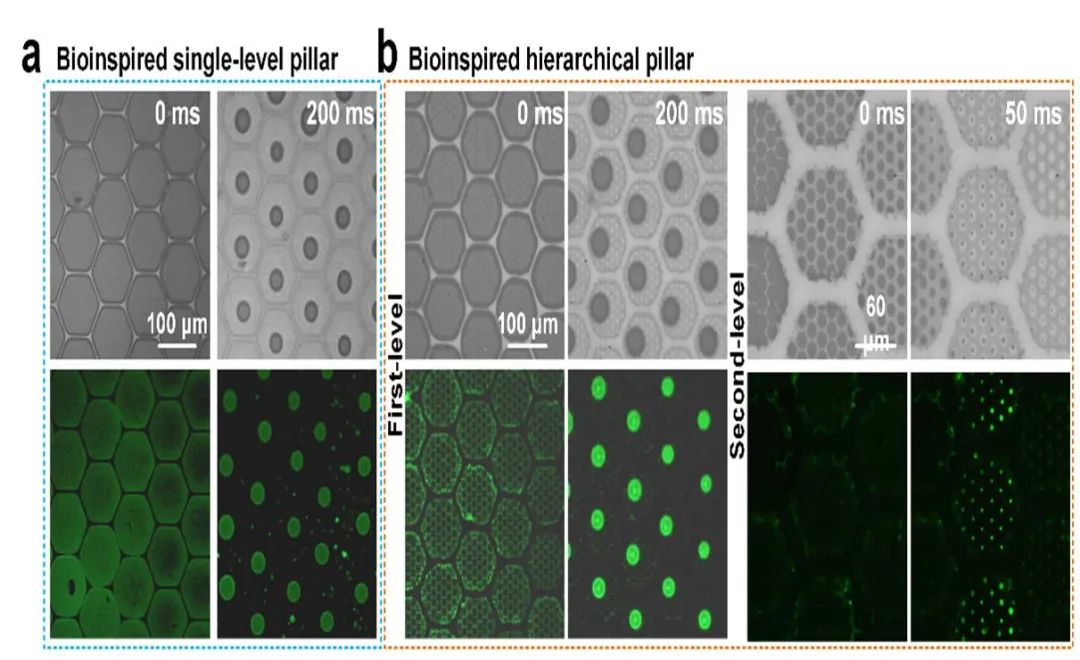
圖3 液膜多級碎化
為揭示碎化后界面液膜對棱柱的作用規律,與清華大學雒院士團隊馬麗然老師合作通過實時動態觀測薄膜干涉條紋變化來估算出界面液膜厚度。經估算,棱柱界面液膜最薄可低于200nm,可形成7倍大氣壓吸附力使棱柱緊緊貼合基底表面(圖4)。這就能揭示樹蛙腳墊即使在沒有外壓力作用下,仍能夠產生極強濕摩擦。
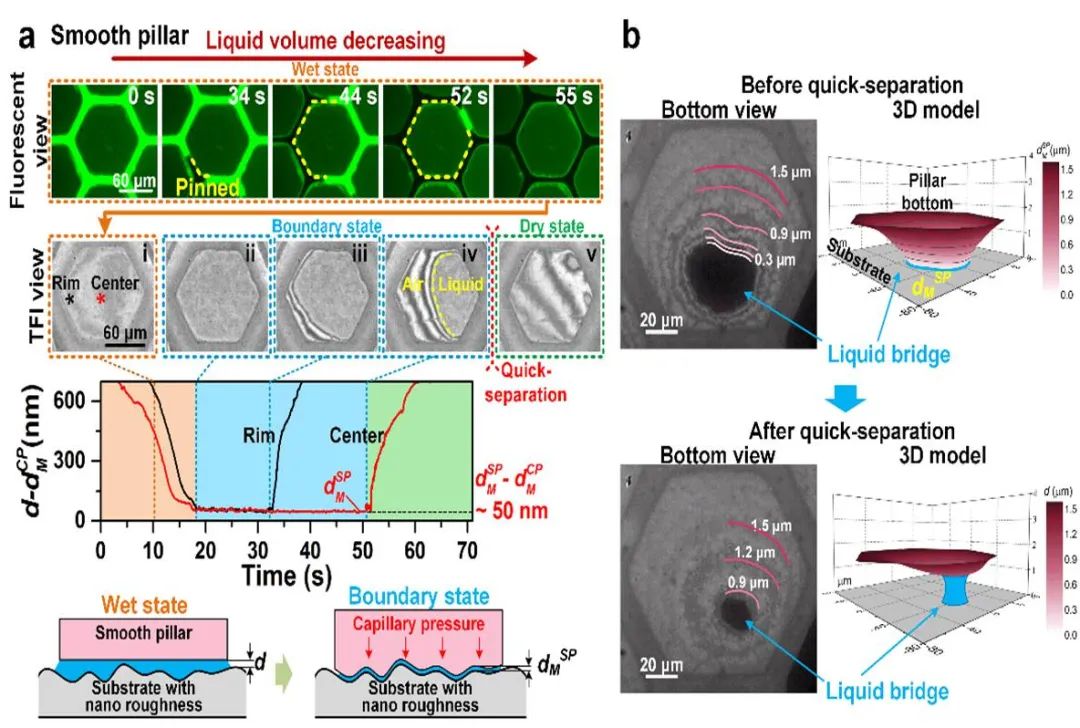
圖4 液膜實時觀測
當棱柱頂部有凹坑時,棱柱頂面的納米液膜毛細力依然作用于整個表面,而固-固作用力僅集中于棱柱外側的凹坑邊緣,從而能夠在邊緣形成更薄的納米液膜(圖5)。干涉條紋表征可知,凹坑棱柱表面液膜比光滑棱柱表面的液膜薄約50 nm,從而有助于形成更強的毛細力和強濕摩擦,達到凹坑增強效果。針對仿樹蛙腳墊微納結構的濕增摩界面效應,進一步提出了兩個濕增摩因子,即液膜自碎化增強因子和納凹坑自吸附增強因子。
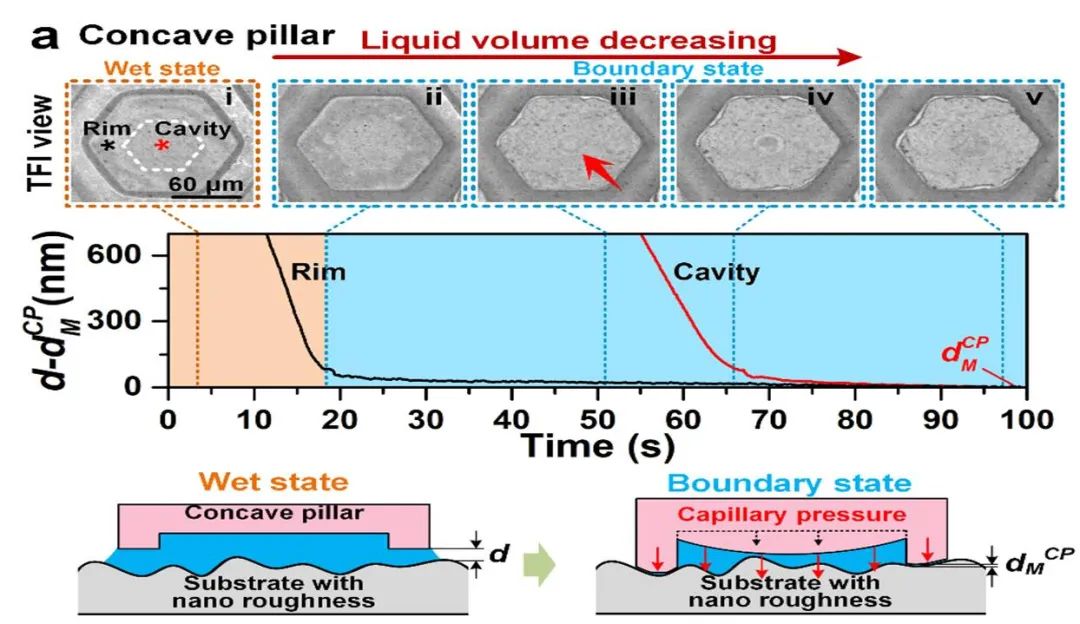
圖5 凹坑自吸附效應
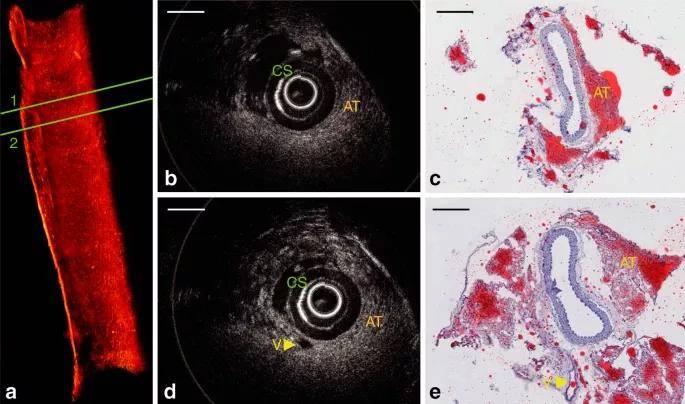
針對手術夾鉗和可穿戴傳感生/機表面的濕滑脫問題,引入仿樹蛙腳掌強濕摩擦機制,實驗結果表明可以有效增強夾鉗在低夾持力下的摩擦力并減小組織變形量,降低組織損傷率,增強可穿戴傳感表面對皮膚汗液承受性能,提高傳感精準度(圖6)。
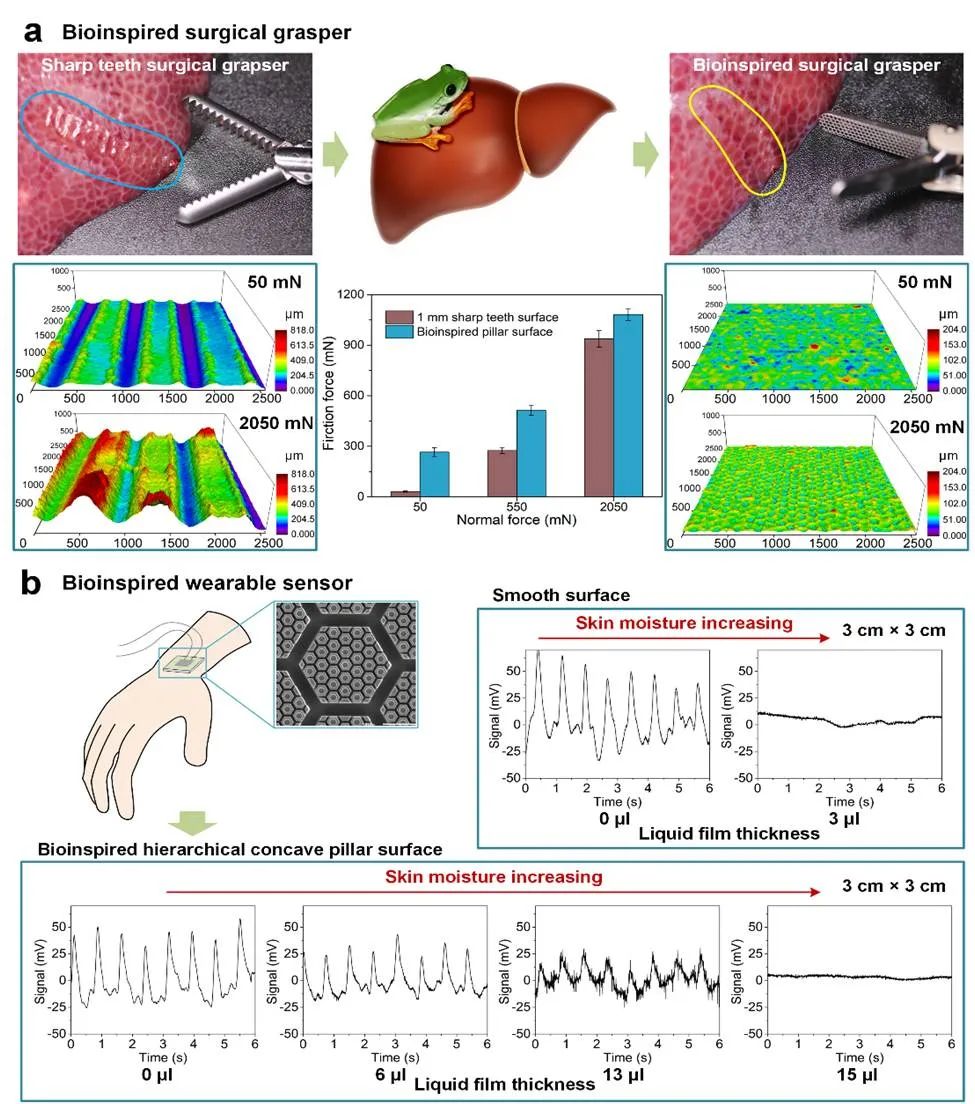
圖6 強濕摩擦仿生表面應用
綜上,該研究揭示了樹蛙腳掌利用其微納多級結構形成的獨特界面液膜調控行為,發展出液膜自碎化增效和凹坑自吸附增強效應,通過生/機界面間形成的納米液膜來增強毛細吸附作用,達到了無外壓力下產生強濕邊界摩擦的效果。本研究為濕滑表界面增摩提供了一種新的方案,為實現精準醫療、可穿戴傳感等領域的濕增摩提供了新思路和新方法。
相關研究得到了國家自然科學基金和科技部重點研發計劃項目等支持。
論文信息:
Micro–Nano Hierarchical Structure Enhanced Strong WetFriction Surface Inspired by Tree Frogs
Liwen Zhang, Huawei Chen*, Yurun Guo, Yan Wang, Yonggang Jiang, Deyuan Zhang, Liran Ma,Jianbin Luo, Lei Jiang
論文鏈接:http://dx.doi.org/10.1002/advs.202001125